异形钢结构三维激光扫描测量建模
发布时间:2025-09-03 18:14:28/ 访问次数:0
异形钢结构因其独特的几何形状和复杂的空间结构,在建筑、桥梁、艺术装置等领域广泛应用,但其测量与建模难度较大。三维激光扫描技术凭借高精度、非接触、快速采集等优势,成为异形钢结构测量建模的理想解决方案。以下从技术原理、实施流程、应用价值及挑战四个方面展开介绍:
一、技术原理:激光点云构建三维数字镜像
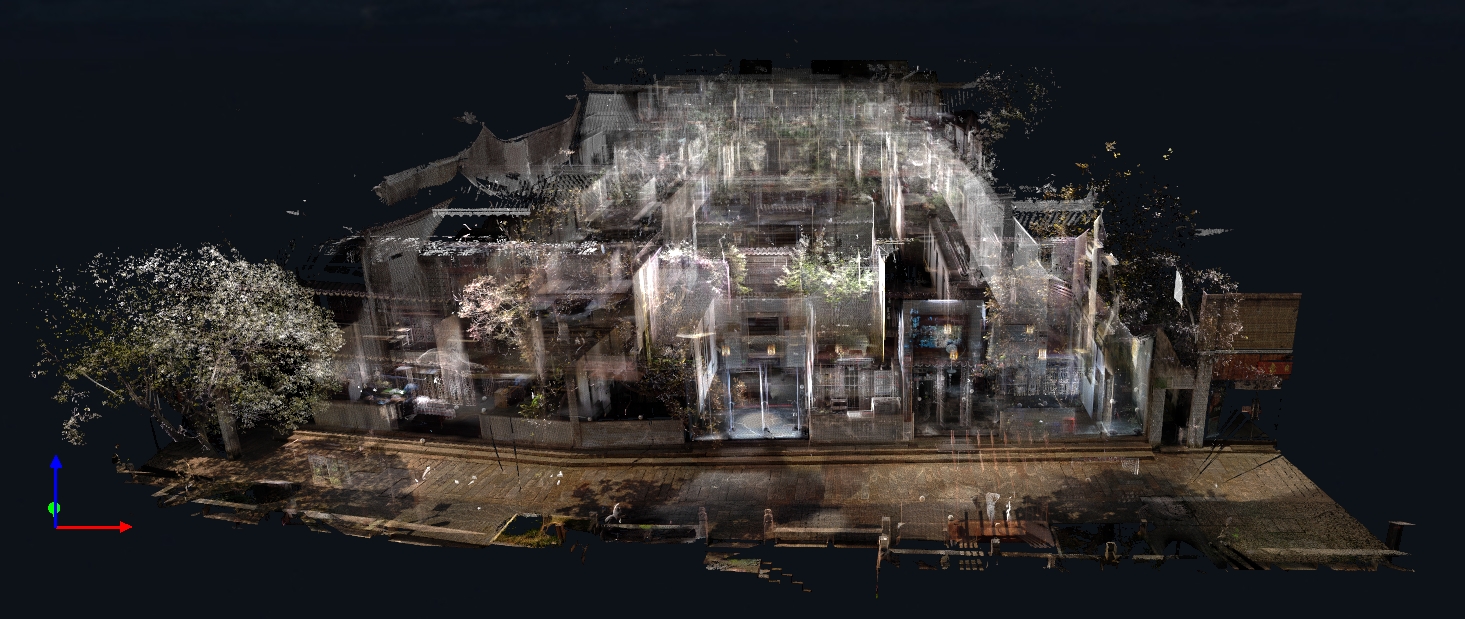
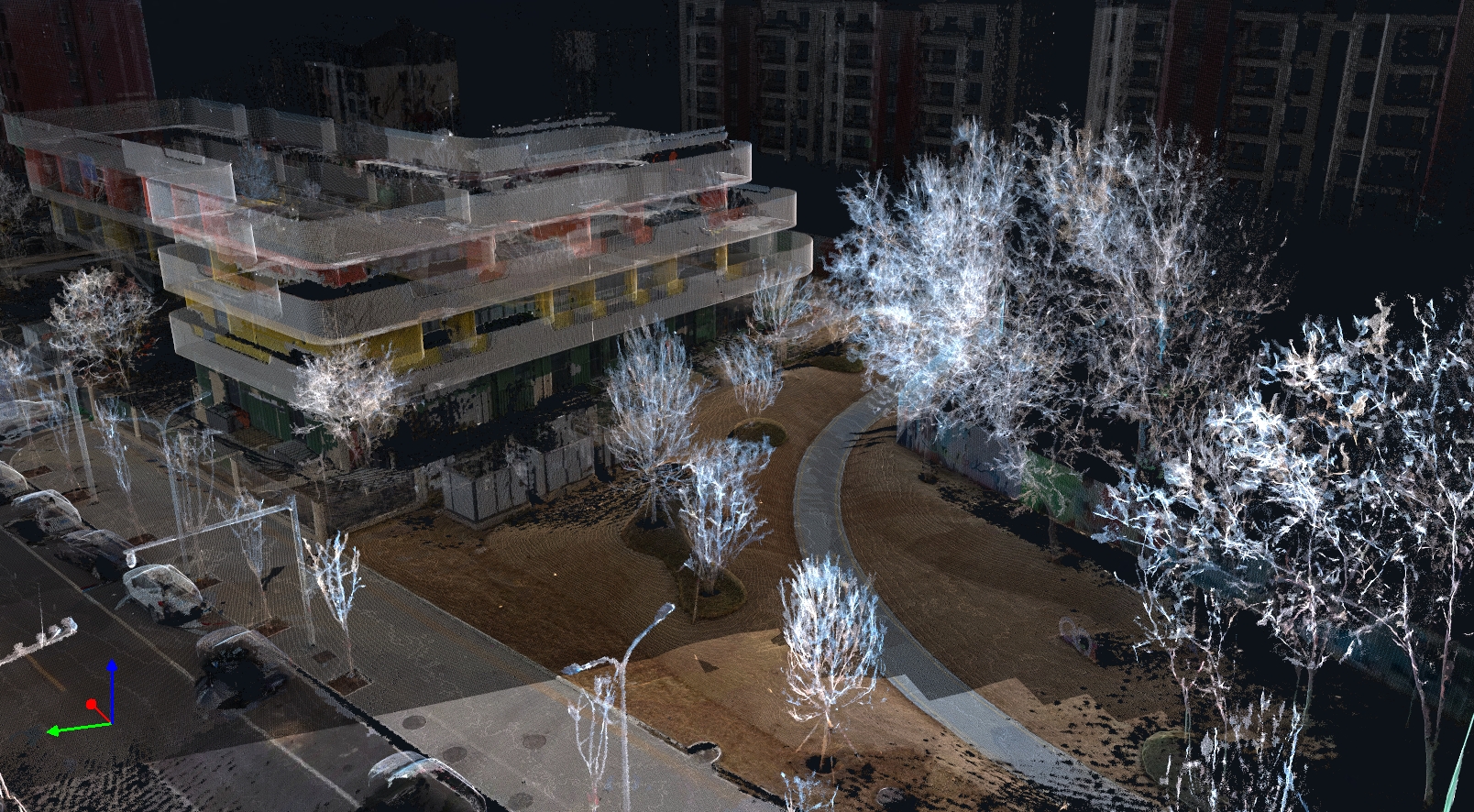
三维激光扫描通过发射高速激光脉冲(每秒数万至数百万次),测量激光从发射到反射回接收器的时间差,结合扫描仪内置的精密角度编码器(记录水平角和垂直角),计算每个激光脚点(即激光束与钢结构表面的交点)的三维坐标(X/Y/Z)。扫描仪沿预设路径移动或旋转,覆盖钢结构全部表面,最终生成由数百万个点组成的“点云数据”。这些点云不仅包含空间坐标,还可记录反射强度、颜色等信息,为后续建模提供丰富细节。
二、实施流程:从数据采集到三维模型交付
1. 前期准备:明确目标与规划方案
需求分析:根据项目需求(如施工验收、变形监测、逆向设计),确定测量精度、范围及重点区域(如节点、曲面)。
设备选型:
地面三维激光扫描仪:适用于中大型钢结构(如桥梁桁架、建筑幕墙),精度可达毫米级。
手持式扫描仪:灵活扫描复杂细节(如螺栓孔、焊接缝),但精度略低(±1-3mm)。
无人机:快速获取大型钢结构(如体育场穹顶)的顶部数据,但需配合地面扫描补全盲区。
布站策略:根据钢结构形状和扫描仪视场角,规划扫描站点位置,确保点云覆盖完整且无遮挡。
2. 现场扫描:多视角数据融合
数据采集:
地面扫描:在钢结构底部及周边设置扫描站,获取基础数据。
高空作业平台扫描:针对高层或悬挑结构,使用升降车或蜘蛛车搭载扫描仪进行补测。
无人机扫描:补充顶部或难以到达区域的数据。
环境控制:避开强光、振动等干扰,确保扫描数据质量。
3. 后处理与建模:从点云到可交付成果
数据预处理:
去噪:去除飞点、孤立点等噪声数据。
配准:将不同扫描站点的点云统一到同一坐标系下,形成完整点云模型。
滤波:分离钢结构点云与背景(如地面、设备)。
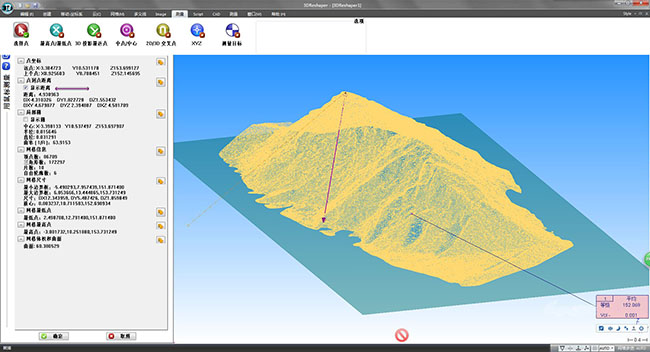
三维建模:
逆向建模:基于点云数据,通过曲面拟合、实体拉伸等操作,重建钢结构的三维CAD模型(如STEP、IGES格式),支持后续设计修改或仿真分析。
BIM模型集成:将点云数据直接导入BIM软件(如Revit、Navisworks),生成带属性的BIM模型,标注材质、规格等信息,辅助施工管理。
质量验证:通过点云与模型的偏差分析,确保建模精度符合要求(如误差≤3mm)。
三、应用价值:破解异形钢结构测量难题
高精度施工验收:对比设计模型与扫描点云,快速检测钢结构安装偏差(如轴线位移、垂直度超差),避免返工。
变形监测与安全评估:定期扫描钢结构,分析点云位移变化,预警潜在变形风险(如桥梁桁架沉降、艺术装置结构失稳)。
逆向设计与改造:针对无图纸的异形钢结构(如历史建筑修复),通过扫描获取三维数据,支持数字化存档或改造设计。
虚拟装配与碰撞检测:在BIM模型中模拟钢结构安装过程,提前发现构件干涉问题,优化施工方案。
四、技术挑战与解决方案
复杂表面反射干扰:异形钢结构表面可能存在镜面反射或深色吸光区域,导致点云缺失。解决方案包括喷涂显像剂、调整扫描角度或使用多波长激光扫描仪。
数据量大与处理效率:单次扫描可能产生GB级点云数据,需高性能计算资源。可采用分区域处理、点云抽稀或云计算平台加速处理。
细部特征捕捉:螺栓孔、焊接缝等微小结构可能因扫描分辨率不足而丢失。需结合手持式扫描仪或摄影测量技术补充细节。
五、典型案例
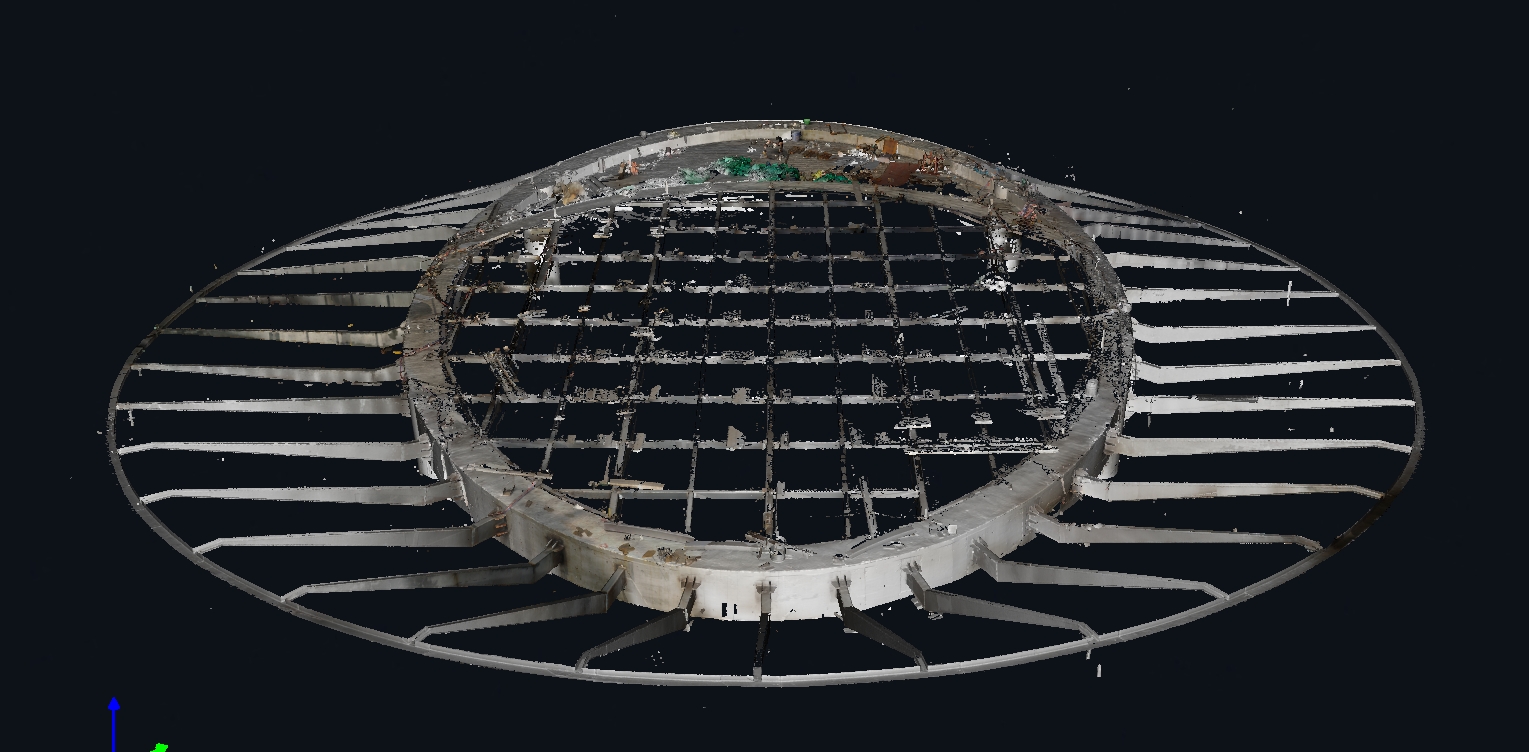
某大型体育场穹顶扫描:采用无人机+地面扫描组合方案,7天内完成12万平方米穹顶的测量,建模精度±2mm,支撑后续维护检修。
艺术装置逆向设计:对无图纸的异形雕塑进行扫描,生成三维模型后3D打印缩比件,辅助展览策划。
三维激光扫描技术为异形钢结构测量建模提供了全流程数字化解决方案,显著提升了测量效率、精度和安全性,是推动钢结构行业智能化转型的关键技术之一。